
- Товары и услуги
- Авто
- Автомобильный
- Дом и офис
- Дом и сад
- ИНСТРУМЕНТЫ И МОЩНОСТЬ
- Кухонная техника
- Лабораторное оборудование
- МИНИКОМПЬЮТЕР
- Медицина и лаборатория
- Метрология
- Монтаж
- Пневматические инструменты и компрессоры
- Повседневная жизнь
- РОБОТЫ И МЕХАНИЧЕСКИЕ КОМПОНЕНТЫ
- СЕНСОРЫ
- Спорт и свободное время
- УМНЫЙ ДОМ
- ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
- Электротехника
- Материал
- Ручные инструменты
- Садоводство
- Электроинструменты
- Гастрономия и пищевая промышленность
- Инструменты и оборудование для искусства и творчества
- Промышленное погрузочно-разгрузочное оборудование
- 3D печать
- Товары для уборки и ухода за домом
- Автоматика и пневматика
- Автомобили, хобби и домашнее хозяйство
- Компьютеры и офис
- Обучающие и развивающие наборы
- Активные элементы
- Пассивные элементы
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- Книги и курсы по электронике
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- ЭЛЕКТРОНИКА
- 3D ПЕЧАТЬ
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- АРДУИНО
- ДАТЧИКИ
- ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- ИСТОЧНИК ПИТАНИЯ
- КИБЕРБЕЗОПАСНОСТЬ
- КОМПЛЕКТЫ РАЗРАБОТКИ ПЛИС
- МАЛИНОВЫЙ ПИ
- МАСТЕРСКАЯ
- МЕХАНИКА
- МИНИ-КОМПЬЮТЕРЫ
- МИНИ-КОМПЬЮТЕРЫ (SBC)
- ОБРАЗОВАНИЕ
- РОБОТЫ И МЕХАНИКИ
- СТАРТОВЫЕ КОМПЛЕКТЫ
- ЭЛЕКТРОНИКА
- О нас
- Отзывы
- Доставка и оплата






TB9051FTG - Одноканальный драйвер для двигателей 28 В / 2,6 А - Pololu 2997
1 255 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: Bas2965780767
Описание продукта: TB9051FTG - одноканальный драйвер для двигателей 28 В / 2,6 А - Pololu 2997
СайтнаTB9051FTG-системныйМодуль позволяет управлятьизДвигатель постоянного тока. Двигатель может работать при напряженииот 4,5 В до 28 Впитаться при непрерывном потреблении тока до 2,6 А, кратковременно (в течение нескольких секунд) до 5 А. Перед использованием рекомендуется ознакомиться с документацией наTB9051FTG-система.
Выводы одноканального драйвера
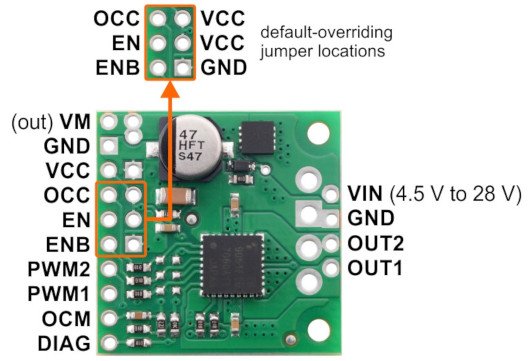
| FOUNDATION | описание |
|---|---|
| Vin | Напряжение питания двигателя варьируется от 4,5 В до 28 В. Он имеет защиту от переполюсовки напряжения питания. |
| Масса | Потенциал заземления системы. |
| VM | Выход для доступа к источнику питания двигателя после защиты от обратной полярности. Они могут использоваться для подачи питания на другие компоненты системы. |
| OFF1 | Выходы - для подключения клемм двигателя. |
| OFF2 | Выходы - для подключения клемм двигателя. |
| VCC | Логическое напряжение - 5 В. |
| OCC | Контроллер отключается в случае перегрузки по току. По умолчанию низкий. Если он высокий, то автоматически пытаюсь возобновить работу после короткой задержки. |
| EN | При низком уровне OUT1 и OUT2 установлены на высокий импеданс. Инвертированная Инвертированная ШИМ может быть подана на этот вывод (когда EN высокий, а PWM1 или PWM2 высокий) По умолчанию низкий. |
| ENB | Когда он высокийOUT1 и OUT2 установлены на высокий импеданс . ШИМ может быть подана на этот вывод (когда ENB низкий, а PWM1 или PWM2 высокий).По умолчанию высокая . |
| ШИМ1 | Вход управления для OUT1. Стандартный низкий уровень. |
| ШИМ2 | Вход управления для OUT2. Стандартный низкий уровень. |
| OCM | Выходной контакт контроля тока обеспечивает аналоговое напряжение обратной связи примерно 500 мВ на усилитель. |
| DIAG | Выход диагностики ошибок. переходит в низкий уровень при возникновении ошибок или отключении контроллера по EN или ENB. |
Подключение блока управления к двигателю постоянного тока
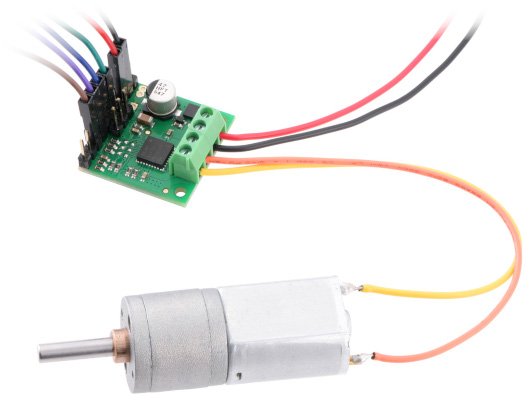
Таблица для режима ШИМ1 + ШИМ2 | ||||||
| Вход | выход | рабочий режим | ||||
| EN | ENB | ШИМ1 | ШИМ2 | OFF1 | OFF2 | |
| 1 | 0 | ШИМ | 0 | ШИМ (H/L) | L. | Вращение вперед / торможение при заданной скорости: ШИМ% |
| 1 | 0 | 0 | ШИМ | L. | ШИМ (H/L) | Реверс / Торможение при заданной скорости: ШИМ% |
| 1 | 0 | 0 | 0 | L. | L. | Стоп, выходы подключены к земле |
| 1 | 0 | 1 | 1 | L. | L. | |
| 0 | X | X | X | OFF | OFF | Freewheeling Выход разделен |
| X | 1 | X | X | OFF | OFF | |
Таблица для режима ШИМ1 + ШИМ2 + EN | ||||||
| Вход | выход | рабочий режим | ||||
| EN | ENB | ШИМ1 | ШИМ2 | OFF1 | OFF2 | |
| ШИМ | 0 | 1 | 0 | ШИМ (H/Z) | ШИМ (L/Z) | Вращение вперед / свободное колесо при заданной скорости: ШИМ% |
| 0 | 1 | ШИМ (L/Z) | ШИМ (H/Z) | Реверс / Свободное колесо при заданной скорости: ШИМ% | ||
| 0 | X | X | X | OFF | OFF | Freewheeling Выход разделен |
| X | 1 | X | X | OFF | OFF | |
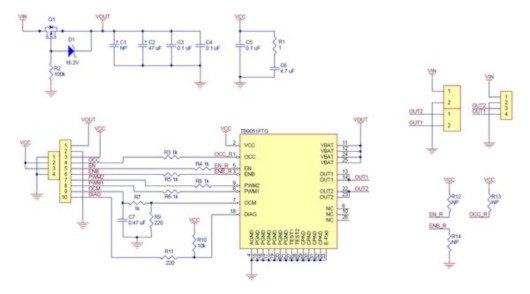
Схема расположения
Система включает в себя драйвер и необходимые для его правильной работы пассивные элементы. Электронная схема представлена на следующем рисунке.
Техническая спецификация контроллера от Pololu
- Одноканальный драйвер для двигателей
- Напряжение питания двигателя: от 4,5 до 28 В
- Выходной ток: 2,6 A (5 A мгновенно)
- Функция автоматического ограничения тока предотвращает перегрев, плавно снижая напряжение вместо внезапного отключения
- Имеет защиту от пониженного напряжения и защиту от короткого замыкания и перегрева
- Защита от обратной полярности напряжения питания
- Размеры: 25,4 x 25,4 мм
Полезные ссылки
|

| Основные атрибуты | |
|---|---|
| Производитель | L&L |
| Тип | Контроллер |
- Цена: 1 255 ₴