
- Товары и услуги
- Авто
- Автомобильный
- Дом и офис
- Дом и сад
- Здоровье
- ИНСТРУМЕНТЫ И МОЩНОСТЬ
- Кухонная техника
- Лабораторное оборудование
- МИНИКОМПЬЮТЕР
- Медицина и лаборатория
- Метрология
- Монтаж
- Парикмахерская и косметика
- Пневматические инструменты и компрессоры
- Повседневная жизнь
- РОБОТЫ И МЕХАНИЧЕСКИЕ КОМПОНЕНТЫ
- СЕНСОРЫ
- Сад
- Спорт и досуг
- Спорт и свободное время
- УМНЫЙ ДОМ
- ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
- Электротехника
- Материал
- Ручные инструменты
- Садоводство
- Электроинструменты
- Гастрономия и пищевая промышленность
- Инструменты и оборудование для искусства и творчества
- Промышленное погрузочно-разгрузочное оборудование
- Станки и аксессуары
- 3D печать
- Вентиляционные устройства
- Мебельная фурнитура
- Оборудование для животноводства и зоотовары
- Сварочное оборудование
- Товары для уборки и ухода за домом
- Насосы
- Товары для дома
- Мастерская и инструменты
- Товары для офиса
- Уличные перила, желоба, заборы и пр.
- Ремесла и санитарное обеспечение
- Поставки для предприятий общественного питания
- Автоматика и пневматика
- Автомобили, хобби и домашнее хозяйство
- Компьютеры и офис
- Обучающие и развивающие наборы
- Активные элементы
- Пассивные элементы
- Здоровье и благополучие
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- Книги и курсы по электронике
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- ЭЛЕКТРОНИКА
- 3D ПЕЧАТЬ
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- АРДУИНО
- ДАТЧИКИ
- ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- ИСТОЧНИК ПИТАНИЯ
- КИБЕРБЕЗОПАСНОСТЬ
- КОМПЛЕКТЫ РАЗРАБОТКИ ПЛИС
- МАЛИНОВЫЙ ПИ
- МАСТЕРСКАЯ
- МЕХАНИКА
- МИНИ-КОМПЬЮТЕРЫ
- МИНИ-КОМПЬЮТЕРЫ (SBC)
- ОБРАЗОВАНИЕ
- РОБОТЫ И МЕХАНИКИ
- СТАРТОВЫЕ КОМПЛЕКТЫ
- ЭЛЕКТРОНИКА
- О нас
- Отзывы
- Доставка и оплата




DFRobot Gravity - линейный/аналоговый датчик Холла магнитного поля - DFR1132
265 ₴
235 ₴
Показать оптовые ценыМинимальная сумма заказа на сайте — 300 ₴
- В наличии
- Оптом и в розницу
- Код: BasBotDFR-25293
Описание продукта: DFRobot Gravity - линейный/аналоговый датчик Холла магнитного поля - DFR1132
Сенсорный модуль DFRobot Gravity Hall предназначен для измерения и мониторингаНапряженность магнитного поляспроектирован. Он оснащен 3 аналоговыми контактами и светодиодным дисплеем для отображения обнаруженного магнитного поля. Это придет с3,3 В - 5 Впоставки,ток его питания находится в диапазоне от 4,2 мА до 8 мА. Он имеет низкий уровень шума, поэтому возможны лишь минимальные помехи. Его можно использовать с такими контроллерами, какАрдуино, Микро:битиУНИХАКЕРи поэтому подходит, например, для определения положения и скорости в робототехнике или в системах безопасности.
Kсовместим с АрдуиноПроизводитель подготовил подробное руководство пользователя, содержащее описание проектов с использованием датчика и пример программного кода.
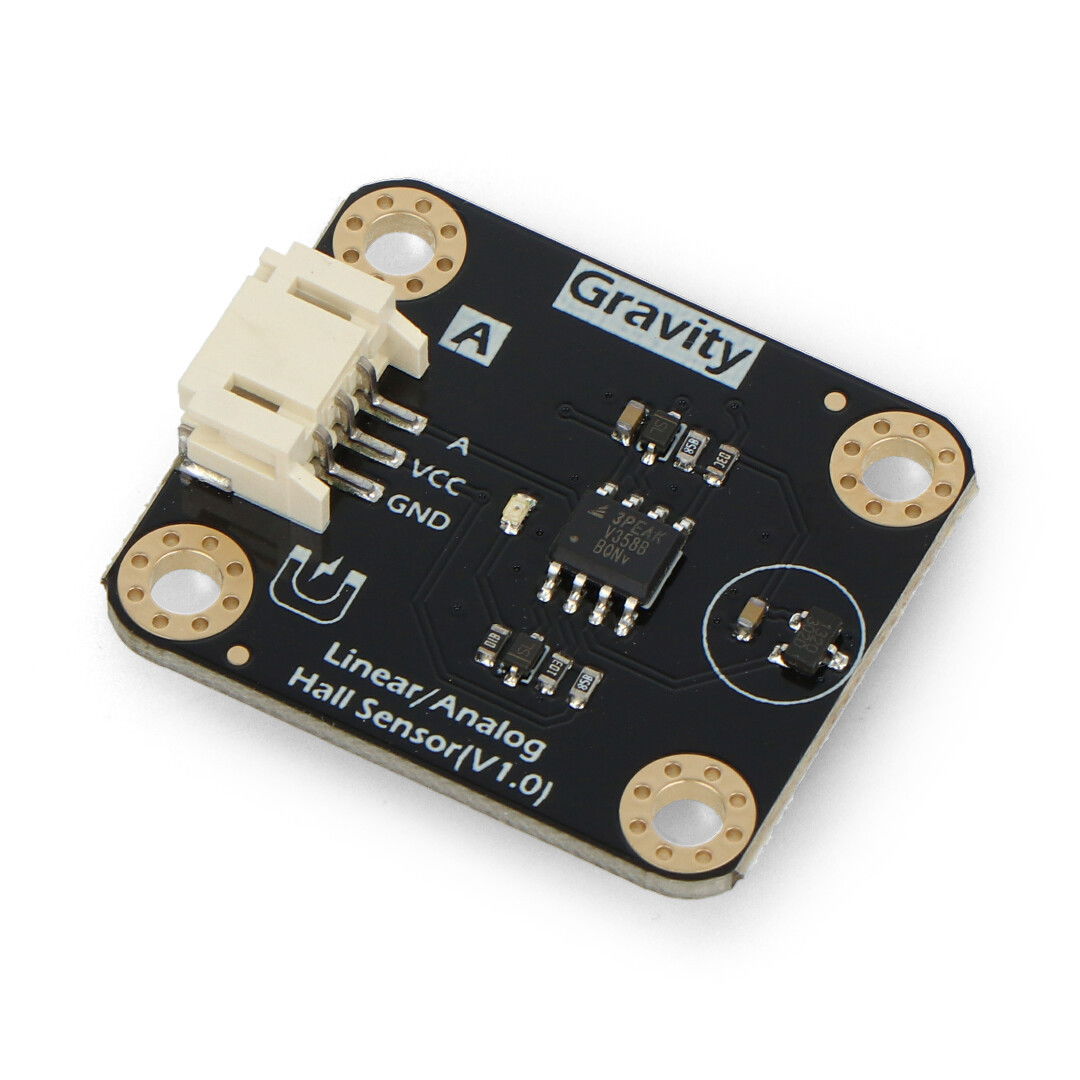
DFRobot Gravity - линейный/аналоговый датчик Холла магнитного поля - DFR1132.
Модуль DFRobot Gravity с датчиком Холла.
Ключевые особенности датчика DFRobot Gravity DFR1132
- Биполярный датчик: обнаруживает магнитные поля на расстоянии< 1 cm (abhängig von Magnetfeldstärke und -richtung)
- Тихий шум: интегральная схема имеет низкий уровень шума для стабильных и точных измерений.
- Источник питания с одним выходом: Выходной сигнал стабилен и нечувствителен к колебаниям напряжения.
- Встроенный светодиод: загорается при обнаружении магнитного поля, пользователь может быстро проверить работу устройства
- Широкая совместимость:простое соединение с микроконтроллерами, такими как Arduino, Micro:bit и UNIHIKER, что позволяет использовать широкий спектр приложений.
- Простота в обращении: обеспечивает быструю и простую установку и делает датчик удобным в использовании даже для новичков.
Подключение датчика Холла
Датчик работает с микроконтроллером, оснащенным аналоговыми входами (Arduino, Micro:bit, UNIHIKER). Для начала работы подключите:
- VCCк источнику питания 3,3 В или 5 В (в зависимости от потребностей датчика)
- GNDк заземлению цепи
- Aк аналоговому выводу микроконтроллера
После подключения датчик генерирует аналоговый сигнал, пропорциональный силе обнаруженного магнитного поля. Это позволяет точно отслеживать изменения на местах и обрабатывать результаты в электронных проектах.
 Совместим с Arduino, Micro:bit и UNIHAKER.
Совместим с Arduino, Micro:bit и UNIHAKER.
Работа датчика силы тяжести
Усовершенствованная плата DFRobot Gravity DFR1132 имеет в ядре схемы, которые напрямую преобразуют силу магнитной индукции в выходное напряжение. Благодарявысокая точностьДатчик можно использовать для многих решений, требующих точнойОбнаружение магнитного полятребовать. К ним относятся проекты промышленного контроля, научные исследования, системы безопасности и различные проекты, связанные с электронными устройствами. Датчик реагирует на магнитные поля, когда:
- южный полюсмагнит приближается к поверхности обнаружения; в этом случае магнитное поле становится сильнее, а выходное напряжение поднимается выше средней точки и постепенно увеличивается.
- Северный полюсприближается к чувствительной поверхности, затем выходное напряжение падает ниже средней точки и постепенно снижается.
Технические данные DFRobot Gravity DFR1132
- Напряжение питания: от 3,3 В до 5 В
- Ток питания: от 4,2 мА до 8 мА
- Диапазон магнитного поля: ± 1200 Гс
- Светодиодный дисплей: да
- Расстояние обнаружения: <1 см (конкретное расстояние обнаружения зависит от силы и направления магнитного поля)
- Тип данных: аналоговый
- Подключение: 3-контактное с шагом 2 мм.
- Площадь магнитного полюса:
- micro:bit и Arduino (S-Pol): от 520 до 1023
- micro:bit и Arduino (N-полюс): от 0 до 500
- UNIHIKER (Южный полюс): с 2068 по 4095.
- UNIHIKER (Северный полюс): от 0 до 2028
- Размеры пластины: 27 х 32 мм.
- Вес: 3,5 г
Содержание пакета
- 1 x гравитационный линейный/аналоговый датчик Холла магнитного поля DFRobot DFR1132
- 1 соединительный кабель (30 см)

Содержимое набора.

| Основные атрибуты | |
|---|---|
| Производитель | CM |
- Цена: 235 ₴