
- Товары и услуги
- Авто
- Автомобильный
- Дом и офис
- Дом и сад
- ИНСТРУМЕНТЫ И МОЩНОСТЬ
- Кухонная техника
- Лабораторное оборудование
- МИНИКОМПЬЮТЕР
- Медицина и лаборатория
- Метрология
- Монтаж
- Пневматические инструменты и компрессоры
- Повседневная жизнь
- РОБОТЫ И МЕХАНИЧЕСКИЕ КОМПОНЕНТЫ
- СЕНСОРЫ
- Спорт и свободное время
- УМНЫЙ ДОМ
- ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
- Электротехника
- Материал
- Ручные инструменты
- Садоводство
- Электроинструменты
- Гастрономия и пищевая промышленность
- Инструменты и оборудование для искусства и творчества
- Промышленное погрузочно-разгрузочное оборудование
- 3D печать
- Товары для уборки и ухода за домом
- Автоматика и пневматика
- Автомобили, хобби и домашнее хозяйство
- Компьютеры и офис
- Обучающие и развивающие наборы
- Активные элементы
- Пассивные элементы
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- Книги и курсы по электронике
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- ЭЛЕКТРОНИКА
- 3D ПЕЧАТЬ
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- АРДУИНО
- ДАТЧИКИ
- ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- ИСТОЧНИК ПИТАНИЯ
- КИБЕРБЕЗОПАСНОСТЬ
- КОМПЛЕКТЫ РАЗРАБОТКИ ПЛИС
- МАЛИНОВЫЙ ПИ
- МАСТЕРСКАЯ
- МЕХАНИКА
- МИНИ-КОМПЬЮТЕРЫ
- МИНИ-КОМПЬЮТЕРЫ (SBC)
- ОБРАЗОВАНИЕ
- РОБОТЫ И МЕХАНИКИ
- СТАРТОВЫЕ КОМПЛЕКТЫ
- ЭЛЕКТРОНИКА
- О нас
- Отзывы
- Доставка и оплата






G2 High Power 18v17 - одноканальный драйвер для двигателей 30В / 17А - Pololu 2991
3 305 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: Bas3402228785
Описание продукта: G2 High Power 18v17 - одноканальный драйвер для двигателей 30 В / 17 А - Pololu 2991
Модуль можно использовать для управления двигателем постоянного тока. Двигатель может работать с напряжением от 6,5 до 30 В при длительном потреблении тока до 17 А, кратковременно (в течение 10 мс) - до 100 А. Скорость вращения регулируется ШИМ-сигналом, направление - с помощью цифрового выхода DIR, который обеспечивает низкое (логический 0) или высокое (логическая 1) состояние. Кроме того, устройство имеет датчик протекания тока и возможность ограничения тока двигателя.
Спецификация
- Количество каналов: 1
- Напряжение питания: от 6,5 В до 30 В
- Рабочее напряжение логической части: от 1,8 В до 5 В
- Непрерывный ток: 17 А.
- Максимальный мгновенный ток (до 10 мс): 100 А
- Частота ШИМ: до 100 кГц
- Чувствительность датчика тока: 0,02 В / А
- Безопасность:
- защита от переполюсовки напряжения питания
- из-за слишком низкого напряжения питания
- против короткого замыкания
- Размеры: 33 x 20 мм
- Масса: 3,3 г (без разъемов)
- В комплект входит модуль, позолоченные контактные разъемы и винтовые соединители
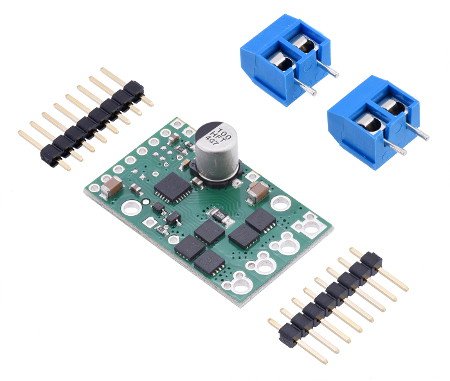
В комплект входят драйвер и разъемы для самостоятельной пайки.
Связь
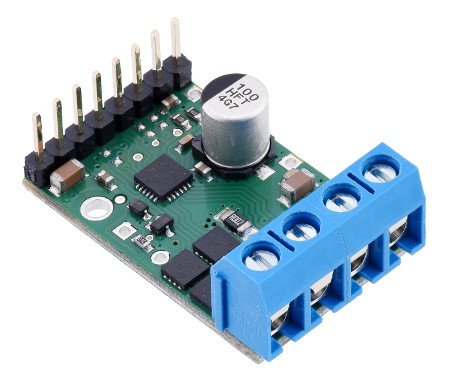
Подключение двигателя и его питания осуществляется с одной стороны модуля. Управляющие контакты (логическая часть от 1,8 В до 5 В) находятся на другой стороне модуля. Источник питания двигателя способен выдавать большие токи. К выводам двигателя можно припаять позолоченные штыревые или винтовые разъемы (оба входят в комплект поставки).
Для обеспечения высокой эффективности очень важно подключить большой конденсатор как можно ближе к модулю между источником питания двигателя и землей. Рекомендуется использовать конденсатор емкостью не менее нескольких сотен мкФ. Необходимая мощность зависит от многих факторов, например, от качества и расстояния до источника питания (более 30 см), параметров двигателя и частоты ШИМ-сигнала. Конденсатор можно подключить к отверстиям, обозначенным "+" и "-" (VM и GND соответственно). Контроллер имеет встроенный конденсатор емкостью 100 мкФ, что вполне достаточно для базовых приложений. Однако для большинства схем рекомендуется использовать более емкий конденсатор.
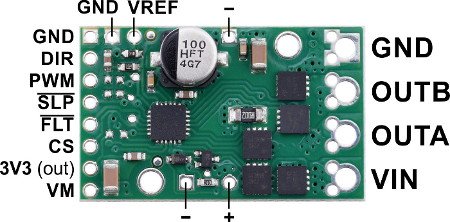
Логическая часть модуля работает с напряжением от 1,8 В до 5 В (максимально 5,5 В). По умолчанию драйвер находится в состоянии покоя. Для его запуска необходимо подключить вывод SLP к высокому уровню. В типовых приложениях требуется только два дополнительных вывода PWM и DIR.
Вести
| FOUNDATION | описание |
|---|---|
Номер шасси | Напряжение питания двигателя составляет от 6,5 В до 40 В с защитой от обратной полярности. |
| VM | Этот вывод обеспечивает доступ к источнику питания двигателя, который защищен от обратной полярности. Он может использоваться для подачи питания от реверсивного соединения на другие элементы. Его не следует использовать при большом токе. Вывод используется как выход. |
| + и - | Выводы для подключения конденсатора подключаются к ВМ или GND. |
| 3v3 | Регулируемый выход 3,3 В, обеспечивающий несколько миллиампер для питания небольших компонентов. Он не может быть подключен к другим внешним линиям питания. Выключен, когда контроллер находится в спящем режиме. Остерегайтесь короткого замыкания с выводом V+, так как это может привести к повреждению платы. |
| Масса | Масса системы. |
| AUSA | Выходной контакт на двигатель (подключается к одной из клемм двигателя). |
| AUSB | Выходной контакт на двигатель (подключается к другой клемме двигателя). |
| ШИМ | Входной сигнал ШИМ для управления двигателем. По умолчанию низкий уровень. |
| DIR | Контакт направления вращения двигателя. Ток течет от OUTA к OUTB, когда он низкий, и от OUTB к OUTA, когда он высокий. По умолчанию низкий. |
| SLP | Вывод, переводящий контроллер в спящий режим. По умолчанию низкий уровень (сон). |
| FLT | Индикатор ошибки. Устанавливает низкий уровень после обнаружения ошибки. Для его использования он должен быть подключен к высокому состоянию (напряжение логики системы). |
| CS | Выход чувствительности по току. Генерирует напряжение, пропорциональное току двигателя: 400 мВ / А + 50 мВ смещения. |
| AERF | Вход опорного напряжения. Для ограничения максимального выходного тока подключите резистор к земле. Без дополнительного резистора максимальное значение составляет 30 А. |
Таблица истинности
В таблице приведены зависимости выходов от входных сигналов:
H - высокое состояние
L - низкое состояние
X - не имеет значения
ШИМ | DIR | AUSA | AUSB | Состояние двигателя |
|---|---|---|---|---|
ЧАС. | ЧАС. | ЧАС. | L. | Двигатель вращается по часовой стрелке со скоростью % ШИМ. |
ЧАС. | L. | L. | ЧАС. | Двигатель вращается против часовой стрелки со скоростью % ШИМ. |
L. | X | L. | L. | Тормоза. |
Частота ШИМ
Контроллер поддерживает частоту ШИМ до 100 кГц, однако потери на переключение пропорциональны частоте. Стандартная частота составляет 20 кГц.
Для изменения выходных сигналов длительность старшего импульса ШИМ должна составлять не менее 0,5 мкс, что делает невозможным использование низких рабочих циклов на высоких частотах. Например, при частоте 100 кГц период импульса составляет 10 мкс, аминимальный ненулевой рабочий цикл 0,5 / 10 или 5 %.
Чувствительность измерения тока
Выход CS активен только тогда, когда Н-мост находится в режиме драйвера. Он неактивен (низкое состояние), когда управление находится в режиме торможения, что происходит при низком уровне ШИМ или активном ограничении тока. Ток через двигатель продолжает протекать, когда управление начинает торможение, но ток на выводе CS не отражает ток двигателя в режиме торможения. Напряжение CS используется внутри драйвера, чтобы избежать помех, не нагружайте этот вывод емкостной нагрузкой (конденсатором) и не подключайте к нему нагрузку более нескольких мА.
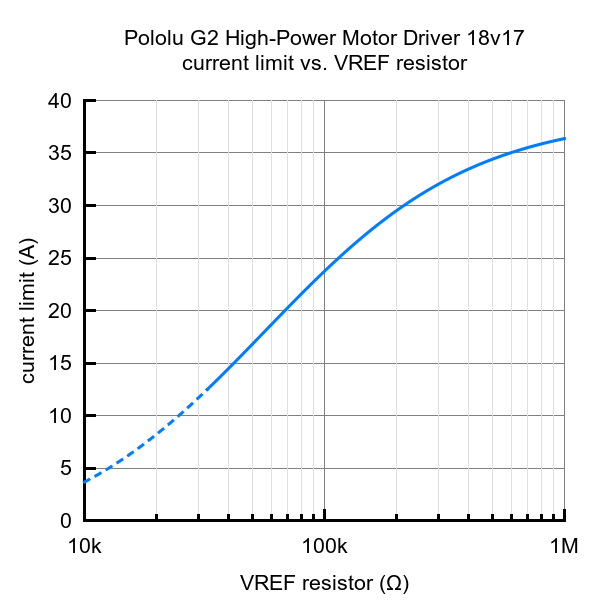
Модуль драйвера имеет возможность ограничения тока двигателя по отсечке. Когда ток достигает порогового значения, контроллер на короткое время переходит в режим торможения, после чего двигатель снова включается. Практичнее использовать контроллер с двигателем, которому требуется несколько ампер для работы, но гораздо больше для запуска.
По умолчанию ограничение тока составляет 30 А. Его можно снизить, установив резистор между выводами VREF и GND. На следующей диаграмме показана зависимость между значением резистора на VREF и предельным током. Например, при 100 кОм между VREF и GND ток снижается примерно до 16 А. При особо низких значениях (пунктирная линия) ограничение тока становится менее точным.
Условия для распознавания ошибки
Контроллер может обнаруживать различные ошибки, которые сигнализируются установкой вывода FLT в низкое состояние. Для его использования он должен быть переведен в высокое состояние (напряжение системной логики). Можно обнаружить короткое замыкание на выходах, слишком низкое напряжение и перегрев. Все неисправности отключают выходы двигателя, но не блокируют их, что означает, что контроллер попытается возобновить работу после устранения неисправности.
Контроллер может кратковременно выдерживать большие броски тока (100 А в течение нескольких миллисекунд). В непрерывном режиме работы он может выдерживать ток 17 А, но это зависит от внешних условий, таких как температура окружающей среды и охлаждение двигателя. Для повышения производительности на плату может быть установлен теплоотвод.
Контроллер не имеет функции автоматического отключения при перегреве. Необходимо соблюдать осторожность, чтобы не повредить систему.
Видео
Видео, описывающее работу H-моста - драйвера двигателя постоянного тока.
Обзор мощных драйверов G2
| Имя | напряжение Энергия | Стром постоянно |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A. |
| G2 Высокомощный 18v17 | 30 V | 17 A. |
| G2 High-Power 24v21 | 40 V | 21A. |
| G2 High-Power 24v13 | 40 V | 13 A. |
Полезные ссылки
|

- Цена: 3 305 ₴