
- Товары и услуги
- Авто
- Автомобильный
- Дом и офис
- Дом и сад
- Здоровье
- ИНСТРУМЕНТЫ И МОЩНОСТЬ
- Кухонная техника
- Лабораторное оборудование
- МИНИКОМПЬЮТЕР
- Медицина и лаборатория
- Метрология
- Монтаж
- Парикмахерская и косметика
- Пневматические инструменты и компрессоры
- Повседневная жизнь
- РОБОТЫ И МЕХАНИЧЕСКИЕ КОМПОНЕНТЫ
- СЕНСОРЫ
- Сад
- Спорт и досуг
- Спорт и свободное время
- УМНЫЙ ДОМ
- ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
- Электротехника
- Материал
- Ручные инструменты
- Садоводство
- Электроинструменты
- Гастрономия и пищевая промышленность
- Инструменты и оборудование для искусства и творчества
- Промышленное погрузочно-разгрузочное оборудование
- Станки и аксессуары
- 3D печать
- Вентиляционные устройства
- Мебельная фурнитура
- Оборудование для животноводства и зоотовары
- Сварочное оборудование
- Товары для уборки и ухода за домом
- Насосы
- Товары для дома
- Мастерская и инструменты
- Товары для офиса
- Уличные перила, желоба, заборы и пр.
- Ремесла и санитарное обеспечение
- Поставки для предприятий общественного питания
- Автоматика и пневматика
- Автомобили, хобби и домашнее хозяйство
- Компьютеры и офис
- Обучающие и развивающие наборы
- Активные элементы
- Пассивные элементы
- Здоровье и благополучие
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- Книги и курсы по электронике
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- ЭЛЕКТРОНИКА
- 3D ПЕЧАТЬ
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- АРДУИНО
- ДАТЧИКИ
- ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- ИСТОЧНИК ПИТАНИЯ
- КИБЕРБЕЗОПАСНОСТЬ
- КОМПЛЕКТЫ РАЗРАБОТКИ ПЛИС
- МАЛИНОВЫЙ ПИ
- МАСТЕРСКАЯ
- МЕХАНИКА
- МИНИ-КОМПЬЮТЕРЫ
- МИНИ-КОМПЬЮТЕРЫ (SBC)
- ОБРАЗОВАНИЕ
- РОБОТЫ И МЕХАНИКИ
- СТАРТОВЫЕ КОМПЛЕКТЫ
- ЭЛЕКТРОНИКА
- О нас
- Отзывы
- Доставка и оплата







DRV8825 - драйвер шагового двигателя 45 В / 2,2 А - Pololu 2133
1 475 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: Bas2896554850
Описание продукта: Pololu DRV8825 - драйвер шагового двигателя 45 В / 2,2 А
Модуль основан на драйвере DRV8825 от Texas Instruments и позволяет управлять шаговым двигателем с максимальным током потребления 1,5 А на катушку (с охлаждением до 2,2 А). На него подается напряжение от 8,2 В до 45 В. Перед использованием рекомендуется ознакомиться с документацией на драйвер DRV8825.
В наш ассортимент также входит версия DRV8824 для двигателей меньшей мощности. DRV8824 позволяет потреблять ток до 0,75 А на катушку (до 1,2 А с дополнительным охлаждением).
Комплект содержит все необходимые элементы для подключения контроллера - модуль и разъемы для самостоятельной пайки |

Pololu DRV8825 - драйвер шагового двигателя 45 В / 2,2 А.
Подключение драйвера DRV8825.
Основные характеристики драйвера DRV8825
- Модуль имеет простой интерфейс управления шагом и направлением движения
- Может работать в шести режимах: Полный шаг, половина шага, 1/4 шага, 1/8 шага, 1/16 шага и 1/32 шага.
- Позволяет регулировать максимальный ток двигателя с помощью потенциометра, что позволяет использовать более высокие напряжения питания, чем номинальные значения для двигателей, что приводит к увеличению скорости шагового хода
- Двигатели могут работать при напряжении от 8,2 В до 45 В
- Потребляемый ток до 2,2 A (1,5 A без внешнего охлаждения)
- Благодаря встроенному стабилизатору напряжения пользователю не нужно подавать на логическую секцию дополнительное питание.
- DRV8824 работает с системами с логическим напряжением 3,3 В и 5 В.
- Он имеет защиту от слишком высокого тока, температуры и короткого замыкания, а также систему, блокирующую запуск при слишком низком напряжении питания.
- Для увеличения теплоотдающей поверхности панель была изготовлена по четырехслойной технологии с более толстым медным покрытием
- Открытое снизу поле заземления для пайки на радиаторах
- Модуль совместим с системой на базе контроллера A4988 по габаритам и производительности.
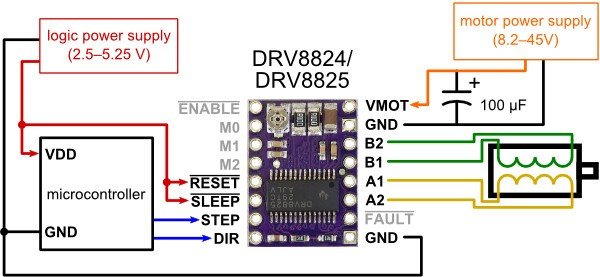
Подключение драйвера DRV8825
Для управления биполярным шаговым двигателем подключите систему, как показано на следующем рисунке. Драйвер также позволяет работать с некоторыми однополярными двигателями, подробности см. в руководстве .
Управление драйверами Pololu
Импульс, поданный на вывод STEP, заставляет двигатель шагать в выбранном направлении, подавая на вывод DIR соответствующее логическое состояние (высокий или низкий уровень). Штырьки STEP и DIR не подтягиваются внутри. Если двигатель должен вращаться только в одном направлении, вывод DIR может быть постоянно подключен к VCC или GND.
Система имеет еще три входа для управления энергопотреблением: RESET SLP и EN, описание которых можно найти в документации. Обратите внимание, что эти контакты ни к чему не подключены. Когда они не используются, их следует подтянуть к напряжению питания (состояние High - логическая единица в диапазоне от 2,2 В до 5,5 В).
Драйвер DRV8825 также имеет выход с маркировкой FAULT. Низкий статус (логический ноль) сигнализирует о возникновении нарушений в работе системы, например, активации одной из функций защиты. На плате этот вывод соединен с выводом SLEEP таким образом, что подтягивание вывода SLEEP также подтягивает FAULT к VCC (подтягивание). Благодаря использованию последовательного защитного резистора линия FAULT также может быть подключена к напряжению VCC, что делает модуль совместимым по выводам с версией A4988.
Текущее ограничение
Для поддержания высокой скорости переключения каскадов можно использовать напряжение питания двигателя выше номинального. Необходимо только ограничить максимальный ток, протекающий через катушки, до каталожного значения двигателя.
Модуль позволяет активно ограничивать ток с помощью потенциометра. Один из способов ввести ограничение - перевести контроллер в режим полного шага и измерить ток, протекающий через одну катушку без подачи сигнала на вход STEP. Измеренный ток составляет 70 % от установленного предела (обе катушки всегда включены и ограничены на 70 % в режиме полного шага).
Другая возможность - измерить напряжение на выводе REF (отмеченном кружком на плате) и рассчитать предельный ток (измерительные резисторы имеют значение 0,1 Ом). Предельный ток можно рассчитать по формуле:
Предел тока = VREF × 2
Например, если двигатель может потреблять максимум 1 А, опорное напряжение на выводе VREF должно быть 0,5 В.
Источник питания для драйвера шагового двигателя
Система может питаться напряжением в диапазоне от 8,2 В до 45 В, подключенным между контактами VMOT (+) и GND (-). Напряжение должно быть отфильтровано внешним конденсатором, расположенным как можно ближе к плате драйвера. Его емкость зависит от максимального тока потребления двигателя.
Предупреждение. Даже относительно низкое напряжение питания при определенных условиях может вызвать пики высокой амплитуды (скачки напряжения), превышающие допустимое значение 45 В. Такая ситуация приводит к необратимому повреждению системы. Один из способов избежать этой проблемы - установить конденсатор (не менее 47 мкФ) как можно ближе к контактам VMOT и GND модуля драйвера. Подключение и отключение двигателя при включенном блоке управления может повредить систему. |
Рассеивание тепла
Печатная плата рассчитана на отвод тепла при непрерывном потреблении тока около 1,5 А на катушку. Если ток значительно выше, необходимо использовать внешний теплоотвод, который можно закрепить теплопроводящим клеем.
Основные отличия от версии A4888
Модуль DRV8825 был разработан таким образом, чтобы быть совместимым с версией на базе чипа A4988. Платы имеют одинаковую форму, размер и распиновку. Однако между ними есть некоторые различия:
- Контакт логической части A4988, используемый в качестве напряжения питания, был заменен на контакт FAULT, поскольку DRV8825 не требует дополнительного источника питания. FAULT подключен через защитный резистор, поэтому его можно успешно использовать в системе, разработанной для модуля A4988, при этом на этот вывод подается напряжение питания логической части (от 2,2 В до 5,5 В).
- В модуле DRV8825 вывод SLEEP по умолчанию не подтянут к высокому уровню, он подключен к выводу FAULT через резистор 10k. В системах, разработанных для микросхемы A4988, резистор 10к подтягивает SLEEP к напряжению питания через напряжение питания логической части, подключенной к FAULT, и устанавливает высокий уровень.
- Потенциометр, ограничивающий максимальный ток для двигателей, находится в другом месте
- С DRV8825 вы можете работать в режиме 1/32 шага, тогда как в A4988 он работал вплоть до 1/16 шага
- DRV8825 имеет более широкий диапазон напряжения питания - до 45 В (A4988 - до 35 В), что также делает его менее восприимчивым к коротким электрическим импульсам с высокой амплитудой (так называемые штыри).
- Лиды имеют разные названия, но выполняют одни и те же функции
Разрешение драйвера Pololu DRV8825
Микрошаговый драйвер, такой как DRV8825, позволяет двигателю работать с высоким разрешением до 1/32 шага. Размер шага выбирается с помощью входов MODE1, MODE1 и MODE2 - доступные режимы перечислены в таблице ниже. По умолчанию все три вывода подтянуты к земле через подтягивающий резистор 100 кОм. Если вы оставите их неподключенными, выберите режим полного шага. Например, если вы используете двигатель с разрешением 200 шагов на оборот, выбор режима ¼ шага означает, что вы работаете с разрешением 800 позиций на оборот.
| MODE0 | MODE1 | MODE2 | разрешение |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | 1/2 шага |
| Низкий | Высокий | Низкий | 1/4 шага |
| Высокий | Высокий | Низкий | 1/8 шага |
| Низкий | Низкий | Высокий | шаг 1/16 |
| Высокий | Низкий | Высокий | 1/32 шага |
| Низкий | Высокий | Высокий | 1/32 шага |
| Высокий | Высокий | Высокий | 1/32 шага |
Схема драйвера шагового двигателя
Система содержит необходимые пассивные компоненты для правильной работыКонтроллеры. Схема подключения показана на следующих рисунках.
Технические характеристики драйвера двигателей Pololu DRV8825
- Напряжение питания: 8,2 В - 45 В
- Непрерывный ток через катушку: 1,5 A
- Максимальный мгновенный ток на катушку: 2,2 A
- Напряжение питания логической части: 2,5 В - 5,25 В
- Разрешение: 1, 1/2, 1/4, 1/8, 1/16 и 1/32 шага

Схема драйвера шагового двигателя.
| Mirosław G. | |
| отлично | |
| Правильно. | |

- Цена: 1 475 ₴