
- Товары и услуги
- Авто
- Автомобильный
- Дом и офис
- Дом и сад
- ИНСТРУМЕНТЫ И МОЩНОСТЬ
- Кухонная техника
- Лабораторное оборудование
- МИНИКОМПЬЮТЕР
- Медицина и лаборатория
- Метрология
- Монтаж
- Пневматические инструменты и компрессоры
- Повседневная жизнь
- РОБОТЫ И МЕХАНИЧЕСКИЕ КОМПОНЕНТЫ
- СЕНСОРЫ
- Спорт и свободное время
- УМНЫЙ ДОМ
- ЭЛЕКТРОННЫЕ КОМПОНЕНТЫ
- Электротехника
- Материал
- Ручные инструменты
- Садоводство
- Электроинструменты
- Гастрономия и пищевая промышленность
- Инструменты и оборудование для искусства и творчества
- Промышленное погрузочно-разгрузочное оборудование
- 3D печать
- Товары для уборки и ухода за домом
- Автоматика и пневматика
- Автомобили, хобби и домашнее хозяйство
- Компьютеры и офис
- Обучающие и развивающие наборы
- Активные элементы
- Пассивные элементы
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- ДАТЧИКИ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- Книги и курсы по электронике
- МИНИ-КОМПЬЮТЕРЫ
- ОСТАЛЬНЫЕ
- РОБОТЫ И МЕХАНИКИ
- ЭЛЕКТРОНИКА
- 3D ПЕЧАТЬ
- 3D-ПЕЧАТЬ
- «Умный дом» — электронные аксессуары
- АРДУИНО
- ДАТЧИКИ
- ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
- ИНСТРУМЕНТЫ И ЭЛЕКТРОПИТАНИЕ
- ИСТОЧНИК ПИТАНИЯ
- КИБЕРБЕЗОПАСНОСТЬ
- КОМПЛЕКТЫ РАЗРАБОТКИ ПЛИС
- МАЛИНОВЫЙ ПИ
- МАСТЕРСКАЯ
- МЕХАНИКА
- МИНИ-КОМПЬЮТЕРЫ
- МИНИ-КОМПЬЮТЕРЫ (SBC)
- ОБРАЗОВАНИЕ
- РОБОТЫ И МЕХАНИКИ
- СТАРТОВЫЕ КОМПЛЕКТЫ
- ЭЛЕКТРОНИКА
- О нас
- Отзывы
- Доставка и оплата




DRV8434A Драйвер шагового двигателя 48V/2A - Pololu 3764
1 175 ₴
Показать оптовые цены- В наличии
- Оптом и в розницу
- Код: Bas2000060322
Описание продукта: DRV8434A Драйвер шагового двигателя 48 В / 2 A - Pololu 3764
Модуль драйвера шагового двигателя на основеМикросхема DRV8434Aот Texas Instruments. Это позволяет подключить двигатель с максимальным потреблением тока додо 2 Aуправления на одну катушку, на которую подается напряжение в диапазонеот 4,5 В до 48 Впоставляется. Он предлагает широкий диапазон разрешений шага -от полных шагов до 1/256 шагов. Регулирование тока с помощью встроенного потенциометра позволяет использовать напряжение выше номинального напряжения двигателя для того, чтобыдостигать более высокой скорости ходьбы. Благодаря встроенномуРегулятор напряженияпользователю не нужно подавать на логическую часть дополнительное питание. Модуль совместим по размерам и выводам с системой на базе драйвера A4988 и поэтому может быть использован в качестве его замены.
Наш ассортимент также включает драйверы для шаговых двигателей с различными рабочими параметрами.
В комплект входит золотая полоска.
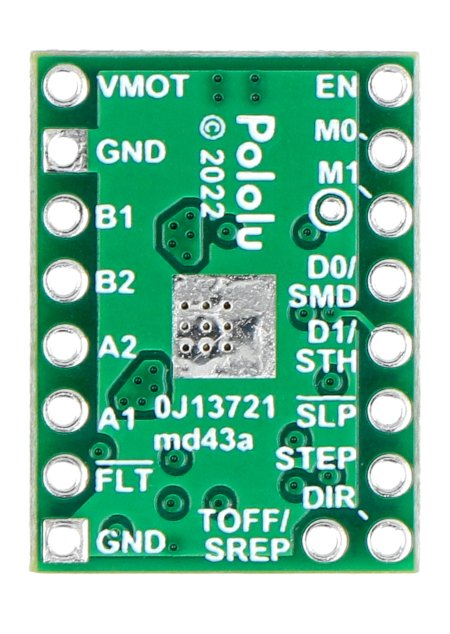
DRV8434A Драйвер шагового двигателя 48 В 2 A - Pololu 3764.
Основные характеристики водителя
- Управление одним биполярным шаговым двигателем
- Простой интерфейс
- Возможность работы в одиннадцати режимах: Полный шаг при 100 % токе, Полный шаг при 70 % токе, Часть 1/2, 1/2, 1/4, 1/8, 1/16, 1/32 - , 1/64, 1/128, 1/256 шаг.
- Диапазон напряжения питания от 4,5 В до 48 В
- Потребляемый ток до 2 А на катушку (1,2 А непрерывно)
- Регулируя ток с помощью встроенного потенциометра, вы можете добиться более высокой скорости шага.
- Встроенный регулятор напряжения
- Защита от перегрева, короткого замыкания и превышения максимального тока
- Открытое снизу поле заземления для пайки радиаторов
- Модуль совместим по размерам и выводам с системой на базе драйвера A4988.
Подключение модуля
Контроллер требует напряжения питания двигателя от 4,5 В до 48 В, которое должно быть подключено через VIN и GND. Обратите внимание, что напряжение питания ниже 6 В ограничивает максимальный регулируемый предел тока.
Управление контроллером
Импульс, поданный на вывод STEP, соответствует шагу шагового двигателя в направлении, указанном на выводе DIR. Штыри STEP и DIR внутренне подтянуты к земле (GND). Поэтому, если двигатель должен вращаться только в одном направлении, DIR может оставаться неподключенным.
Устройство имеет два различных входа для управления состояниями питания: SLEEP (SLP) и ENABLE. Обратите внимание, что по умолчанию оба контакта находятся в низком состоянии. Для запуска контроллера вывод SLP должен быть установлен в высокое состояние.
DRV8434A также имеет выход FAULT (FLT). Он переходит в низкий уровень, когда обнаруживает аномалию в работе системы. На плате этот вывод подключен к выводу SLEEP, поэтому подача высокого уровня на вывод SLP также подтягивает FLT к VCC. Микросхема DRV8434A включает защитный резистор 1,5 кОм для подключения вывода FAULT к VCC, что делает драйвер совместимым с версией A4988.
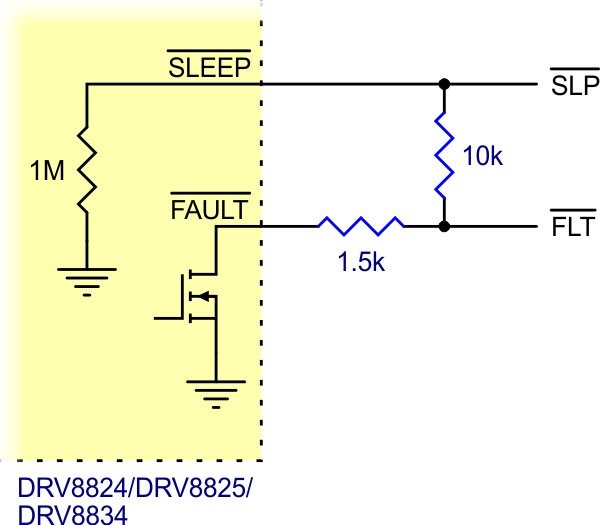
Схема выводов SLP и FLT.
Длина шага
Размер шага определяется входными даннымиM0 и M1выбран. Процедура получения соответствующего разрешения шага показана в следующей таблице.
| MODE0 | MODE1 | РЕЗОЛЮЦИЯ |
| Низкий | Низкий | Полный шаг при 100% мощности |
| высокая | 330 кОм относительно GND | Полный шаг при мощности 70 % |
| высокая | Низкий | 1/2 ступени неполная |
| Hello-Z | Низкий | 1/2 шага |
| Низкий | высокая | 1/4 шага |
| высокая | высокая | 1/8 шага |
| Hello-Z | высокая | шаг 1/16 |
| Низкий | Hello-Z | 1/32 шага |
| Hello-Z | 330 кОм относительно GND | 1/64 Шаг |
| Hello-Z | Hello-Z | 1/128 Шаг |
| высокая | Hello-Z | 1/256 Шаг |
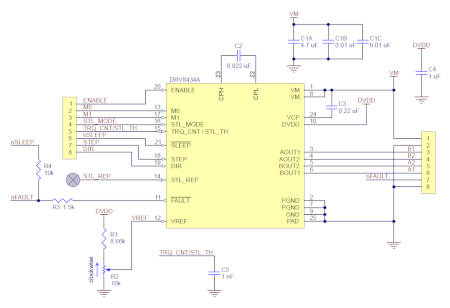
Схема модуля.
Текущее ограничение
Для достижения высокой скорости шага мощность двигателя обычно выше, чем допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А при сопротивлении катушки 5 Ом, что означает максимальное питание двигателя 5 В. Использование такого двигателя при напряжении 9 В позволит увеличить скорость шага, но ток должен быть ограничен до менее чем 1 А, чтобы избежать повреждения двигателя.
Модуль позволяет активно ограничивать ток с помощью потенциометра. Один из способов ввести ограничение - перевести контроллер в режим полного шага и измерить ток, протекающий через катушку, не подавая сигнал на вход STEP.
Другая возможность - измерить напряжение на выводе VREF и рассчитать предельный ток. Предельный ток можно рассчитать по формуле:
Текущее ограничение= AERF / 1,32
Технические характеристики
- Напряжение питания: от 4,5 В до 48 В
- Непрерывный ток на катушку: 1,2 A
- Максимальный мгновенный ток на катушку: 2 A
- Напряжение питания логики: от 1,8 В до 5,5 В
- Количество режимов работы: 11
- Размеры: 20 x 15 мм
- Вес: 1,3 г
Контроллер работает в 11 режимах, от полного до 1/256 шага.

- Цена: 1 175 ₴